

 PT-BR
PT-BR
 EN-US
EN-US ES-ES
ES-ES



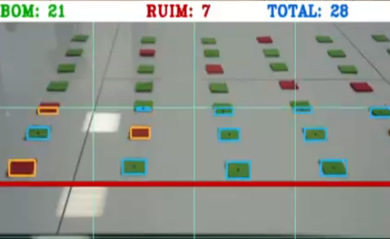
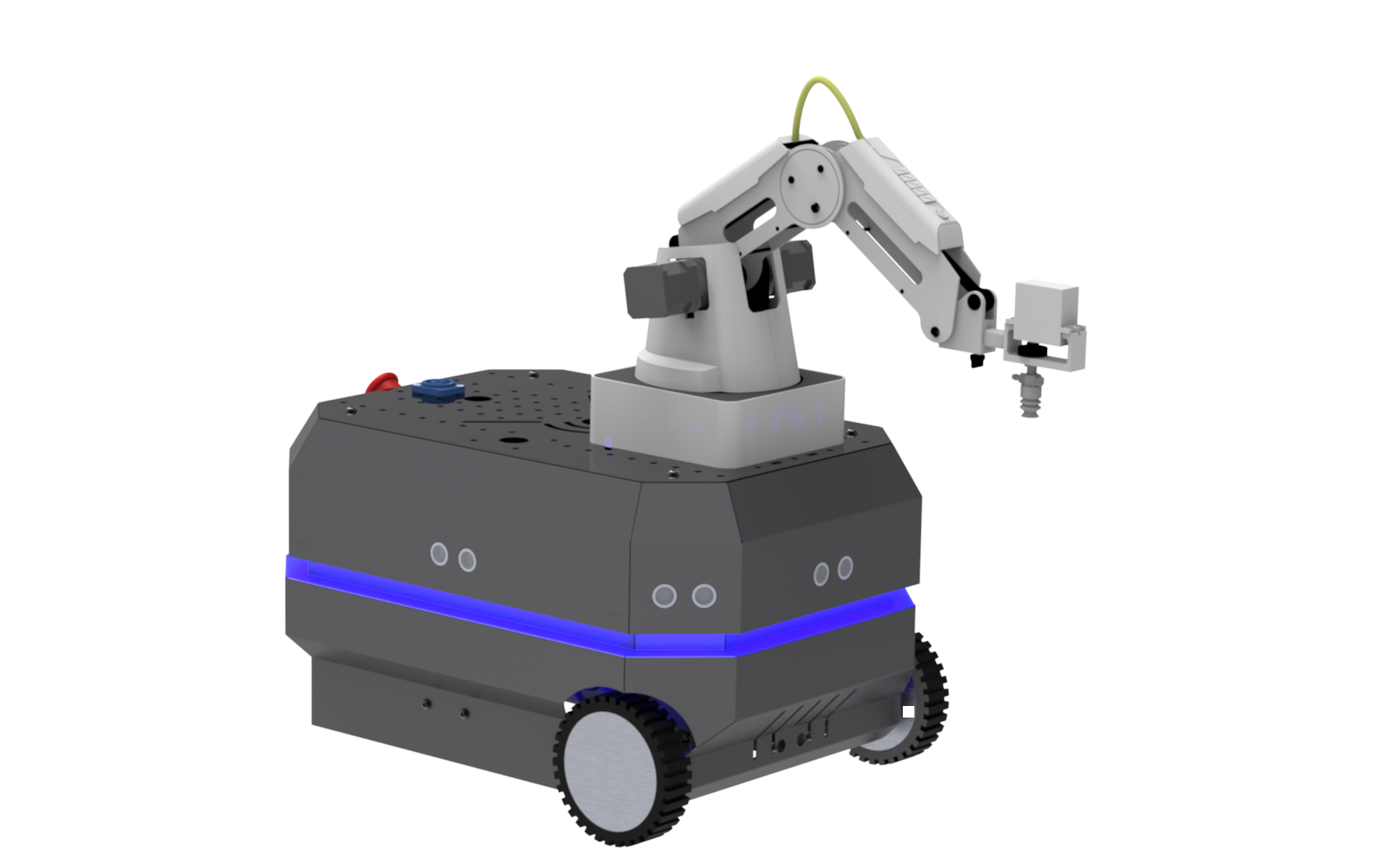
Aplicação visão computacional
Aprender a utilizar a visão computacional em um robô é de extrema importância por várias razões. Primeiramente, a visão computacional permite que um robô compreenda e interprete informações visuais do ambiente, assim como os seres humanos. Isso inclui a capacidade de reconhecer objetos, identificar padrões, detectar cores, reconhecer rostos e ler textos, entre outras tarefas.
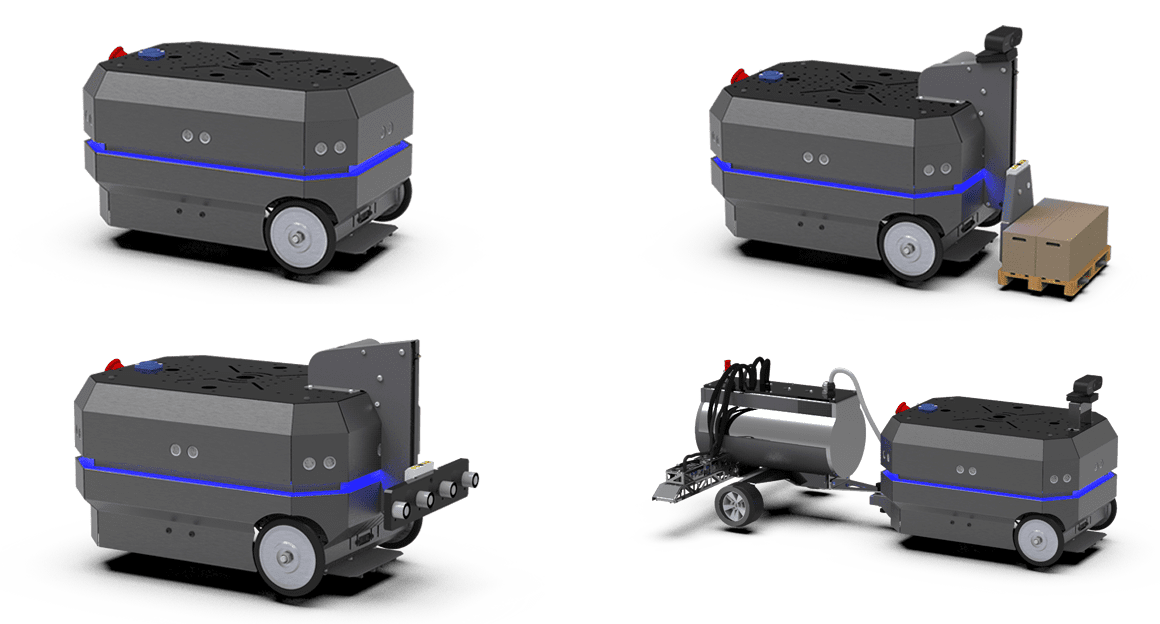
Ao aprender a usar a visão computacional, os desenvolvedores de robôs podem equipar suas criações com habilidades avançadas de percepção visual. Isso é essencial para uma série de aplicações, como robótica autônoma, navegação em ambientes complexos, interação com humanos, inspeção de qualidade em processos industriais, reconhecimento de objetos em robótica de serviço e muito mais.
Além disso, a visão computacional é um campo em constante evolução e oferece muitas oportunidades de pesquisa e inovação. À medida que novas técnicas e algoritmos são desenvolvidos, os profissionais que dominam a visão computacional têm a capacidade de criar soluções cada vez mais avançadas e eficazes para os desafios enfrentados pelos robôs.
Em resumo, a visão computacional desempenha um papel fundamental na capacidade de um robô perceber e entender o mundo visual ao seu redor. Aprender a utilizar essa tecnologia oferece vantagens significativas, desde melhorar a autonomia e a interação do robô até impulsionar a inovação em áreas como medicina, manufatura, segurança e muitas outras.