

 PT-BR
PT-BR
 EN-US
EN-US ES-ES
ES-ES



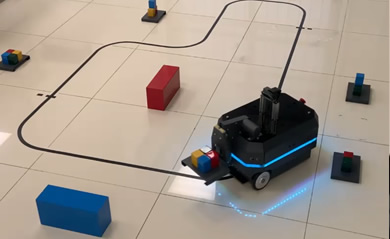
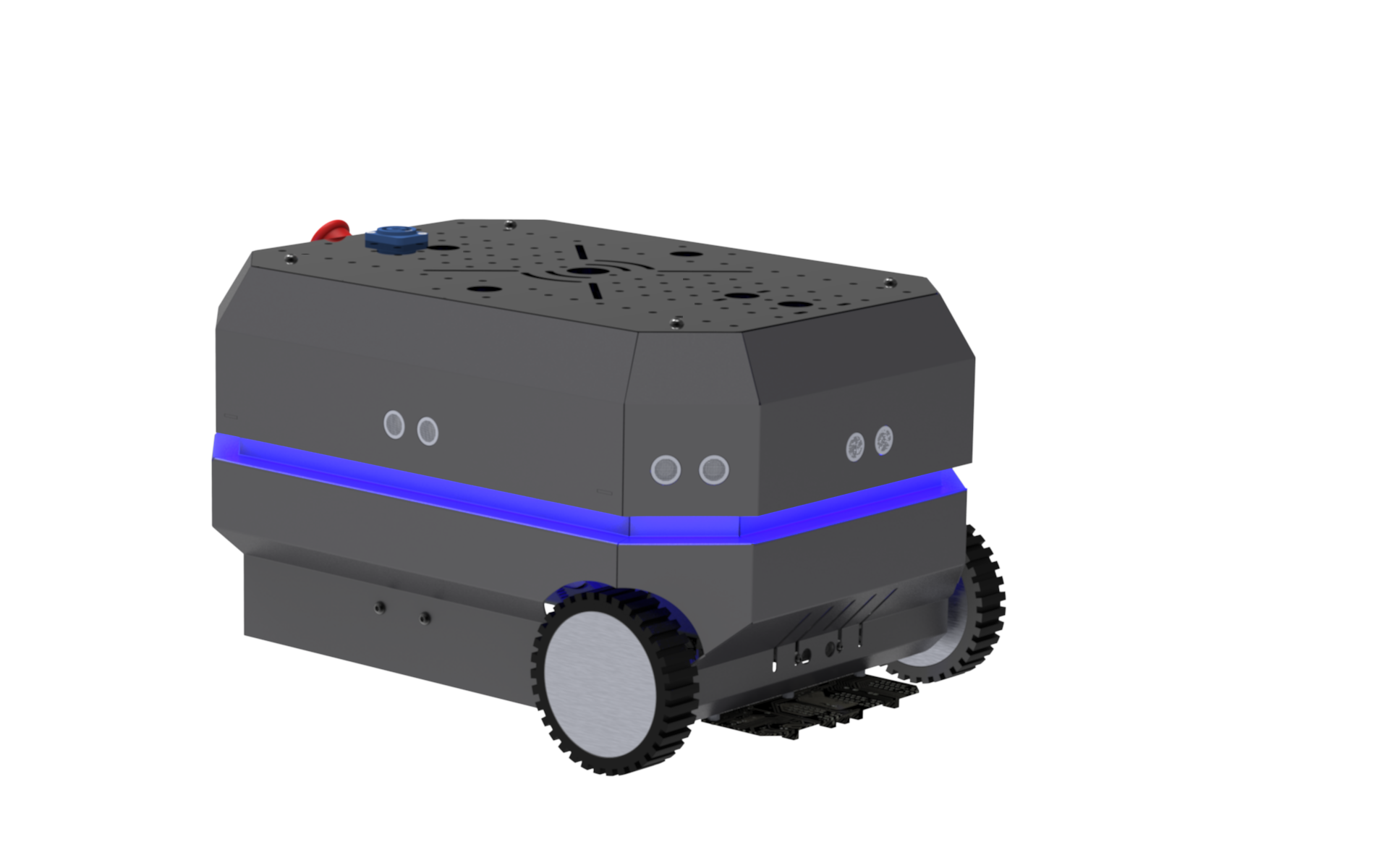
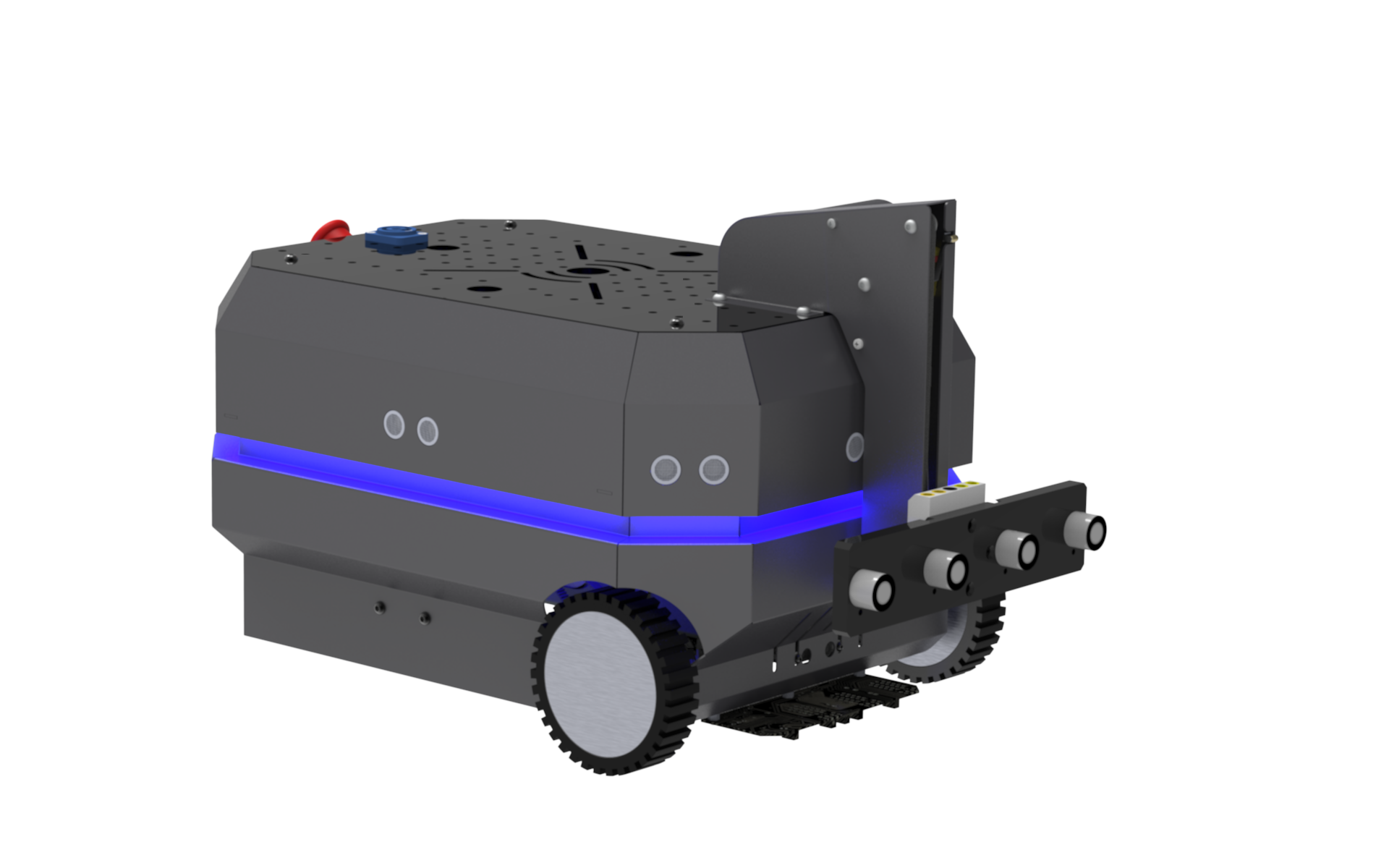
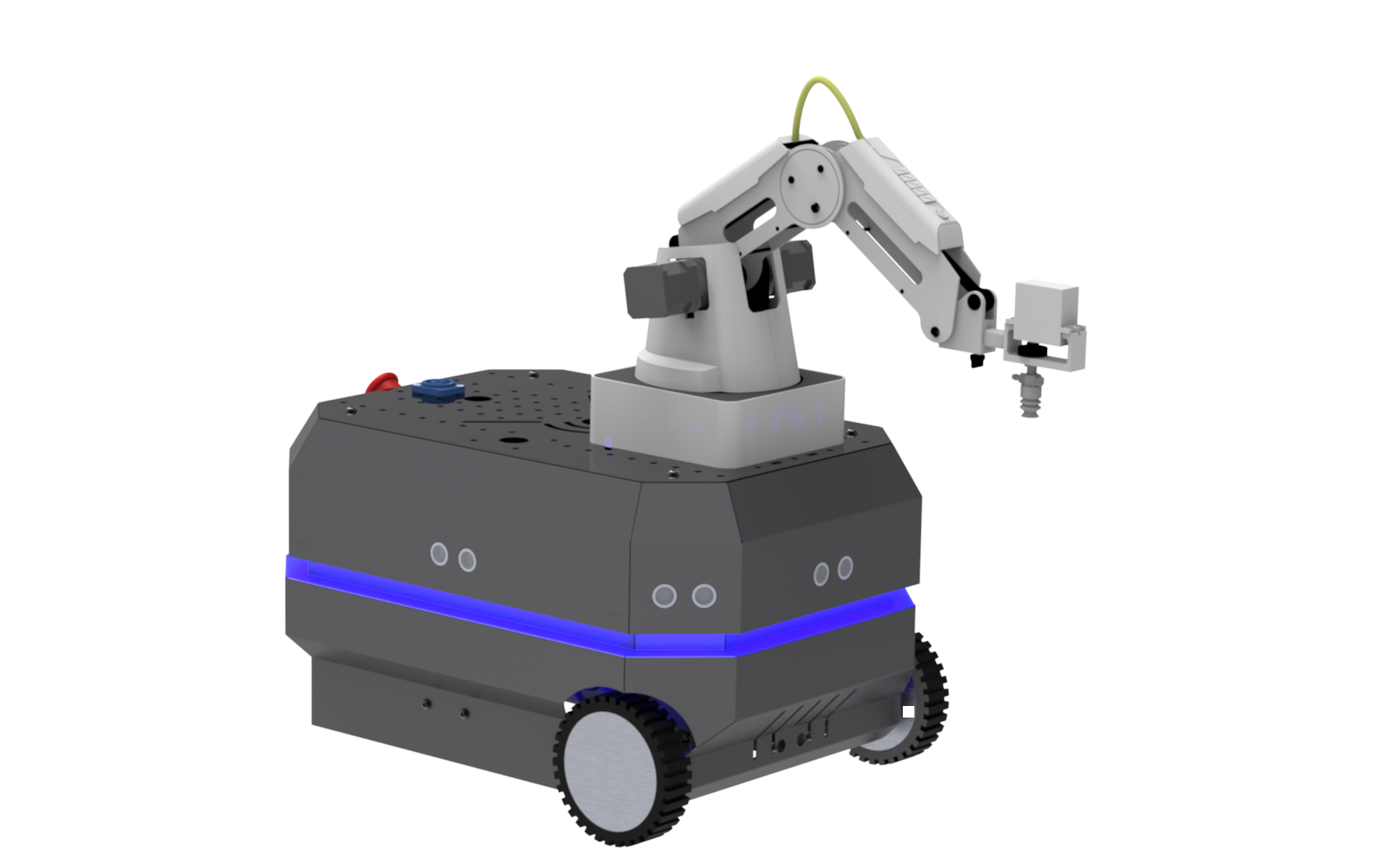
Aplicação fotoelétricos (Sensor de linha)
Aprender a utilizar um sensor fotoelétrico ou seguidor de linha em um robô é importante por várias razões. Primeiro, esses sensores permitem que o robô perceba e reaja a estímulos visuais do ambiente. Isso é fundamental para navegação autônoma, pois o robô pode seguir linhas, evitar obstáculos e tomar decisões com base nas informações captadas pelo sensor.
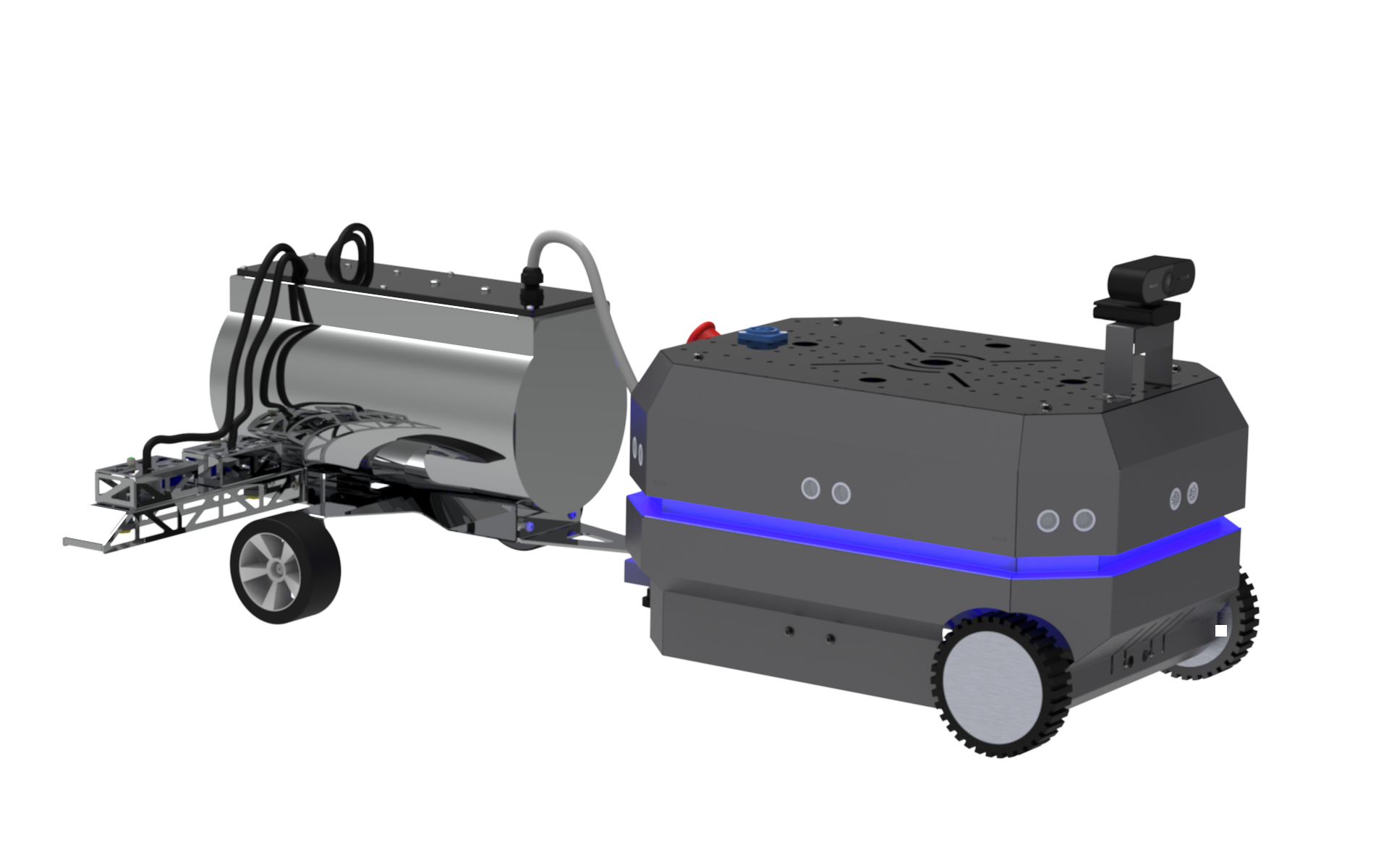
Além disso, o uso desses sensores desenvolve habilidades de programação e resolução de problemas. Ao aprender a interpretar os dados do sensor e programar o robô para responder a essas informações, os alunos ou entusiastas da robótica aprimoram suas habilidades em lógica, algoritmos e pensamento computacional. Outro aspecto importante é a aplicação prática desses sensores. Eles são amplamente utilizados em várias áreas, como robótica industrial, veículos autônomos, automação residencial e até mesmo em jogos e competições de robótica.
Dominar o uso desses sensores permite que os indivíduos contribuam para projetos reais e promovam a inovação tecnológica.
Em resumo, aprender a utilizar um sensor fotossensível ou seguidor de linha em um robô é crucial para desenvolver habilidades técnicas, promover a autonomia da máquina, permitir a navegação autônoma e contribuir para a aplicação prática da robótica em diversos setores.