



 PT-BR
PT-BR
 EN-US
EN-US ES-ES
ES-ES



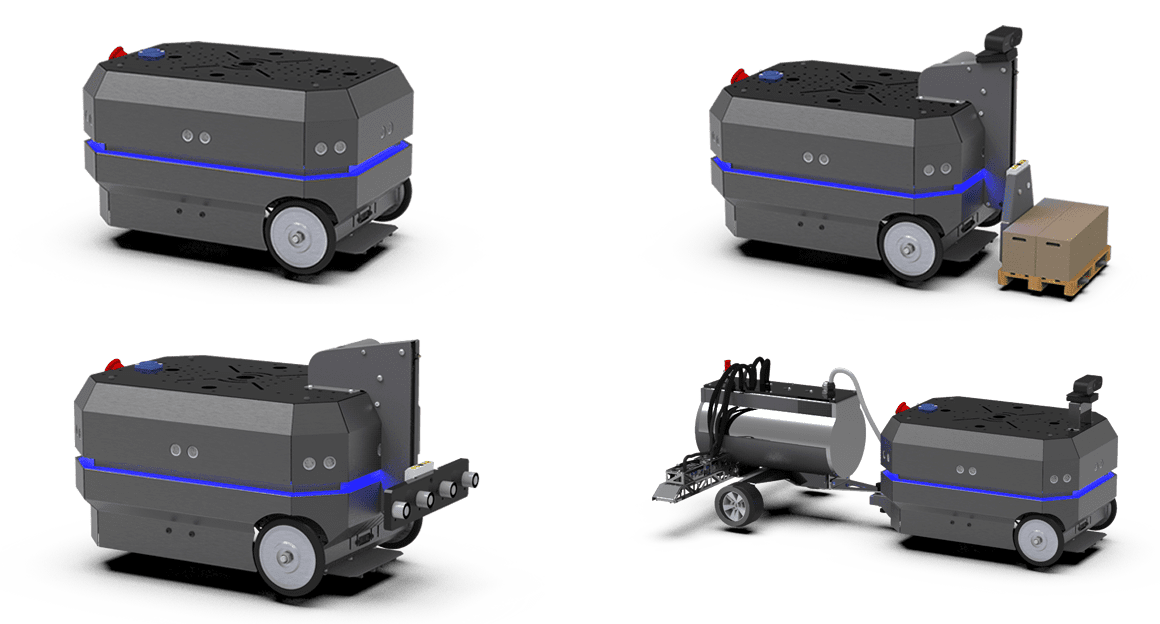
Aplicação Controle remoto USB
Usar um controle remoto para controlar um robô é importante por várias razões. Primeiramente, um controle remoto oferece uma interface conveniente e intuitiva para interagir com o robô. Os controles geralmente consistem em botões, joysticks ou painéis táteis que permitem aos usuários enviar comandos específicos para o robô de forma rápida e precisa.
A utilização de um controle remoto simplifica a operação do robô, especialmente em situações em que é necessário controlar suas ações em tempo real. Isso é particularmente útil em cenários de entretenimento, competições de robótica ou até mesmo em situações de emergência, onde uma resposta imediata é necessária.
Além disso, o controle remoto permite aos usuários controlar o robô à distância, o que é benéfico em diversas situações. Por exemplo, em aplicações de exploração espacial, resgate em áreas perigosas ou monitoramento de ambientes hostis, um controle remoto permite operar o robô sem a necessidade de estar fisicamente presente no local.
Em resumo, o uso de um controle remoto para controlar um robô oferece uma interface intuitiva, facilidade de operação, controle em tempo real, possibilidade de controle à distância e oportunidades de expansão de recursos. É uma ferramenta valiosa para uma ampla gama de aplicações, desde entretenimento até exploração de ambientes perigosos, proporcionando uma experiência de controle conveniente e eficaz.


