



 PT-BR
PT-BR
 EN-US
EN-US ES-ES
ES-ES



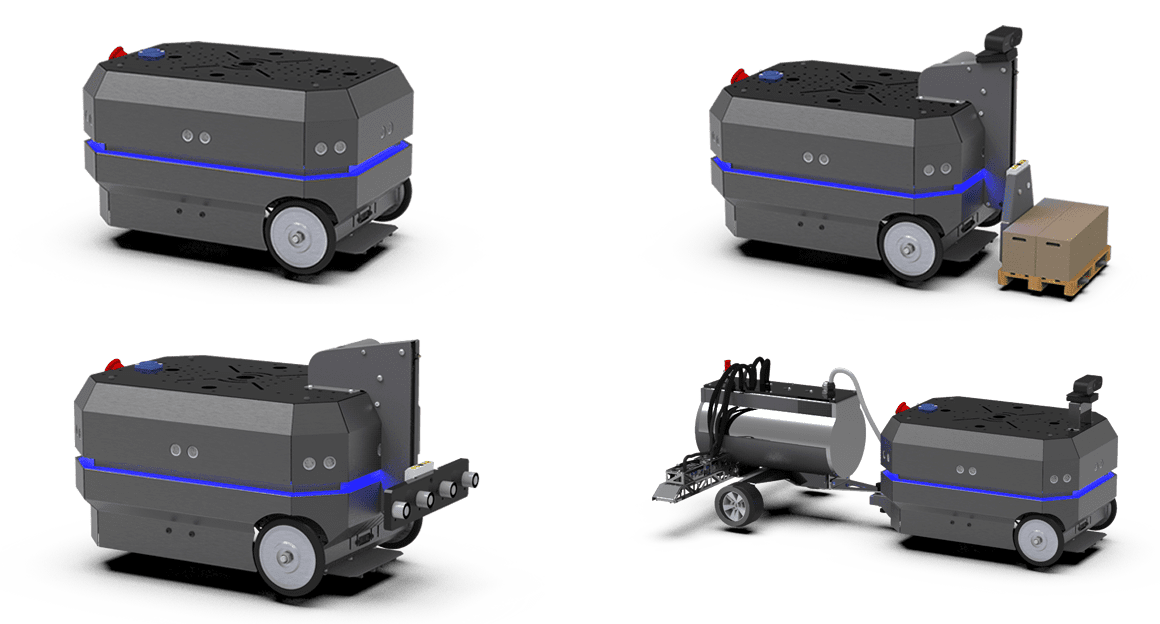
Aplicação sensores ultrassônico
Aprender a utilizar um sensor ultrassônico em um robô é de grande importância por várias razões. Em primeiro lugar, o sensor ultrassônico permite ao robô detectar a presença de objetos e medir a distância entre o robô e esses objetos com base no princípio do eco. Isso é essencial para a navegação segura e evita colisões, tanto em ambientes internos quanto externos.
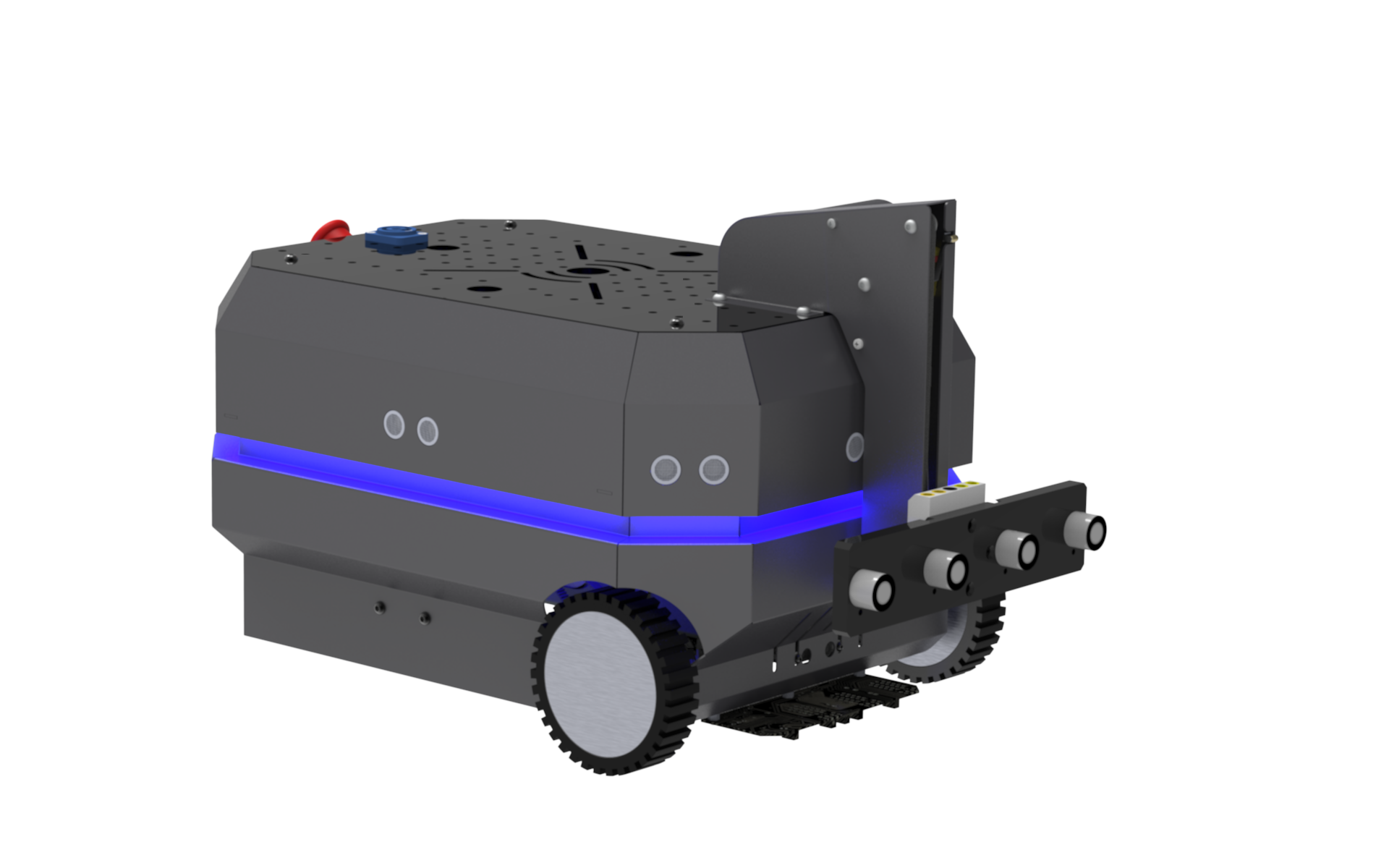
Além disso, o uso do sensor ultrassônico expande as capacidades do robô em termos de percepção do ambiente. Ele pode detectar objetos mesmo quando não estão em sua linha de visão direta, permitindo que o robô evite obstáculos que possam estar ocultos ou fora do campo de visão de outros sensores.
O aprendizado do uso do sensor ultrassônico também desenvolve habilidades de programação e resolução de problemas. Os usuários precisam interpretar os dados do sensor e criar algoritmos para processar as informações recebidas. Isso fortalece o pensamento lógico, a capacidade de análise e a habilidade de tomar decisões com base nas entradas sensoriais.
Em resumo, aprender a utilizar um sensor ultrassônico em um robô é essencial para aprimorar a percepção do ambiente, evitar colisões, desenvolver habilidades de programação e resolver problemas. É uma ferramenta versátil e amplamente utilizada na robótica, proporcionando oportunidades de aplicação em diversas áreas e impulsionando o progresso tecnológico.
